



















 简体中文简体中文
简体中文简体中文















| K2 系列 伺服步进 | 纯位置闭环步进 | 开环步进 | |
|---|---|---|---|
| 控制方法 | FOC+位置、速度、 电流三环控制 | 位置闭环+细分控制 | 细分控制 |
| 电流自适应 | 输出电流随负载 自适应变化 | 输出电流固定,效率低 | 输出电流固定,效率低 |
| 发热 | 电流利用率高, 发热极低 | 电流利用率低,发热量高 | 电流利用率低,发热量高 |
| 力矩 | 同等电流下出力大 高速下力矩衰减小 | 同等电流下出力小 高速下力矩衰减大 | 同等电流下出力小 高速下力矩衰减大 |
| 加速度 | 提供加速度大 | 提供加速度一般 | 提供加速度一般 |
| 速度 | 极限速度更高 | 极限速度一般 | 极限速度一般 |
| 噪声 | 噪声低 | 噪声大 | 噪声大 |
| 丢步 | 不会 | 不会 | 会 |
| 定位精度 | 高,取决于编码器精度 结构阻力不影响精度 | 高,取决于编码器精度 结构阻力不影响精度 | 一般,取决于细分数 结构阻力会影响精度 |



 抗磨损抽出机
抗磨损抽出机
 40 mm³/s 大手机流量热端*
40 mm³/s 大手机流量热端*
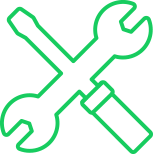 易维护与保养信息组件化制定
易维护与保养信息组件化制定















 K2 Plus
K2 Plus
 K2 Pro
K2 Pro
 K2
K2








