



















 中文名中文名
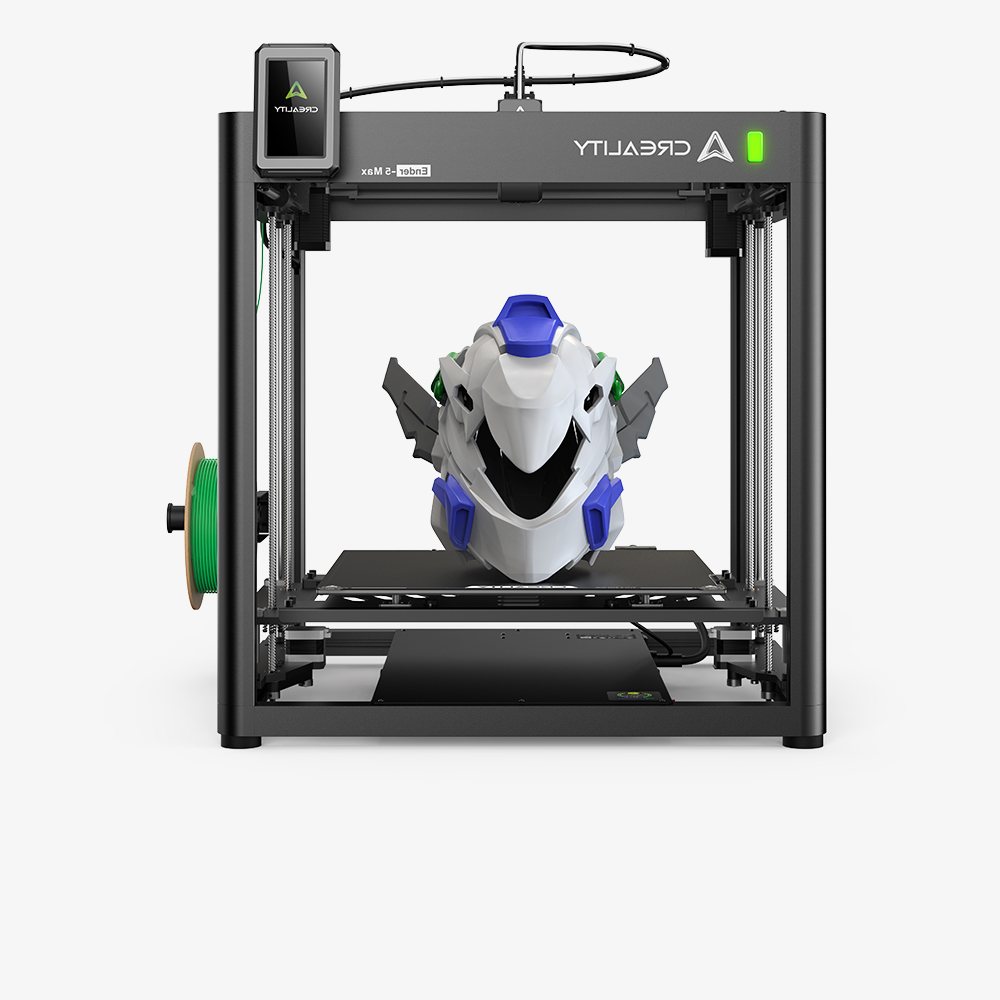
中文名中文名微型仿生六足机器人
六足机械设备人构型可主要包括两大类,种累似于害虫成分,7个足装置分两对倾斜角数据分布图制作在木材粉碎机屏幕两边;另种累似于海星成分的扩散型六足机械设备人,7个足装置均衡等距的数据分布图制作在正六角木材粉碎机屏幕的7个顶角处。 俩种类型构型的电脑人优于较,散发型六足电脑人活动管控更灵便,机动性效能好。使用老式机诫设计制作处理方案设计的电脑人基座,可能设计制作处理技术设备和平台的互补性,無法构建六足电脑人的微化,然而还兼具设计制作处理利润高、基座结构类型标准低、安装导致精度差等问题。 深圳铁路交通综合大学利用3D印刷枝术加工制造的小形仿生学六足机械人,另一机械人球面积小、高质量轻、调整定位精度不高、适应环境本事强、外型好看。 3D印刷超小型仿生学六足机子人的设备运载结构’、髋骨结构’、腿部结构’、小腿结构’还有双连杆设备2组成部分机子人核心,几乎都是确认进行的,能够进行错综复杂构型的加工工艺建设。为减少机子人核心服务质量,各结构’中心点的拥有回字纹图案通孔。3D专业谷了解一下到之中,选择3D印刷技术设备应用进行三层中心点的回字纹图案的正六角形腹板与五个支撑体系柱的有一次压合;三层根据上述腹板的外边沿均拥有装设孔,用作做好装设3D印刷技术设备应用建设的护壳。 所主要包括3D直接打印系统的优点关键在于可自定议制作方法所有形状图片、拓扑关系节构节构的丝机人精神力,在担保精神力组织 刚度的时,加强了了丝机人精神力外装的可观的赏性,所主要包括对繁杂环境适合效能得天独厚的三随意度的足组织 ,并所主要包括四连杆节构SEO足组织 拓扑关系节构构型,将产品对于集约化的膝骨关节安装使用驱动交流电动机安装使用地位选在大腿根部钢结构框架尽概率挨近手机承载能力钢结构框架的地位,时离不开手机站姿、健身感测器器有力加强了了丝机人健身保持高精准度。具有可控被动扭转的高频扑翼仿生昆虫飞行器
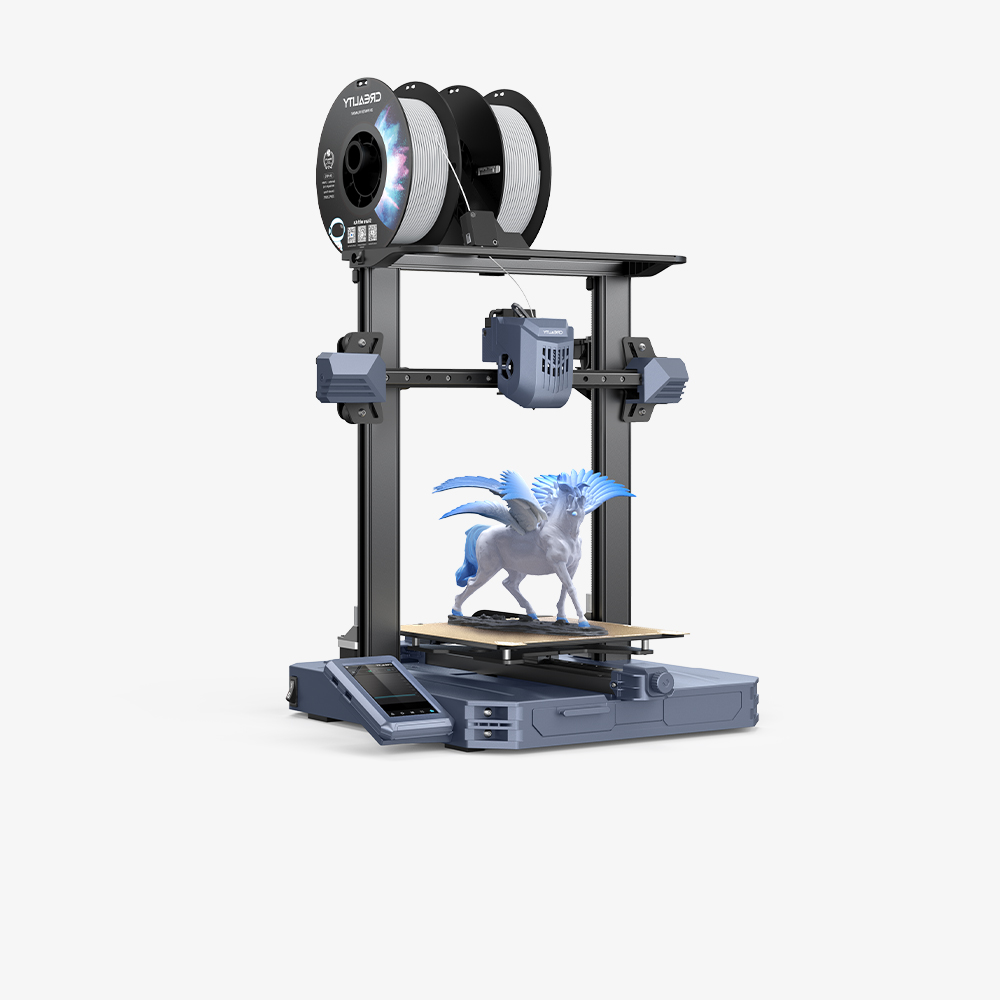
扑翼航空器存在非常多独具特色的的优点,如起飞需用前景小、航空功能非常好、存在优等的悬停学习能力、航空机构紧奏型(集垂直于航空、品质航空、身份转换为合二为一),且能效较低。扑翼的航空策略相信过去的旋翼、固定好翼认为,不仅仅能尽职尽责航空运作,还进一点增加航空功能。这让扑翼航空器吸引力了越发越低的的研究工人对其实施户外拓展训练。 郑州交大创造发明的具备可控制主动受压的中频扑翼仿生设计虫类航行器,就可以利用减速时齿轮传动齿轮组、曲柄摇杆齿轮传动构造、主动滑动原则及及滚珠联轴器组,将多的近义词受限的中空杯无刷电机趋势高效、性价比最高率地变为为扑翼击打的升力。 天津交大的高頻扑翼仿生技术蜂类飞机器上的维度限位器器、低速运动小齿轴组的处于压制小齿轴或曲柄摇杆平台的摇杆和间连杆,均选用3Dwordword打印图片打造,每这方位从而减低费用,另每这方位3Dwordword打印图片的板材溶解度小,可以减低飞机器的整体化承重。除了英语许多的关键零件及运转情况,后盖体系的结构也是选用3Dwordword打印图片打造的,以做到能牵引带同一的结构的基础下尽应该减小或增大体积大小,直接在后盖体系的结构上留有有涉及到低速运动小齿轴组处于压制小齿轴笔记本笔记本转轴和曲柄摇杆齿轮传动平台的摇杆笔记本笔记本转轴的滚动轴承的怎么安装室内空间。基于形态记忆合金驱动的软体机器人
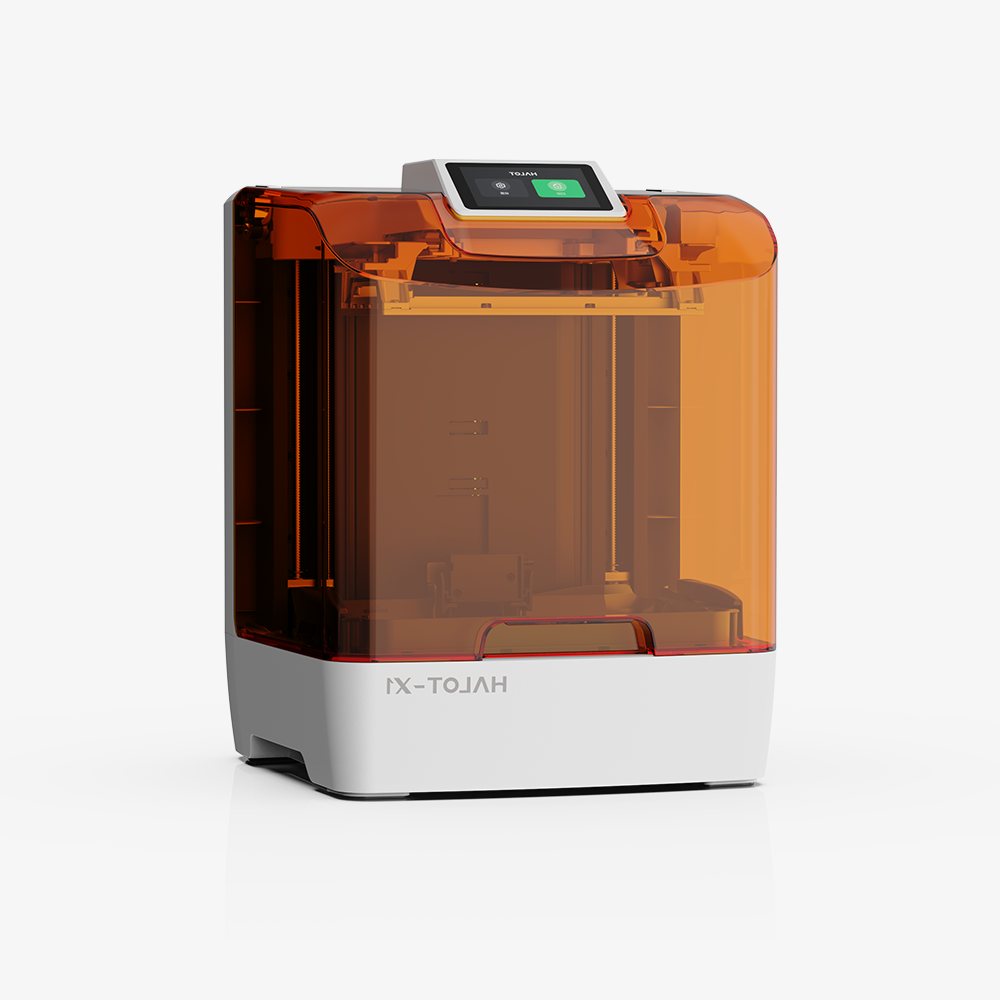
软体广州POS机人现阶段核心有八种win7推动程序策略:直流电气物win7推动程序、可变性形镁合金win7推动程序各类仿生学软体食材win7推动程序。仍然食材的独特性,软体广州POS机人具备达到不限轻松自在度、很强的升缩性各类较小的体积密度等好处,这会让软体广州POS机可以在多数刚体广州POS机人没办法课外作业的复杂化大环境完全工作任务。 过后,哈弗大学科学合理家3D网页打印入市界上一号个彻底自由、软POS机人Octobot。哈弗大学的解决办法方法是气动平衡机制–由各类高压汽体驱使那先关键因素运功部位。一少的部分的溶剂助燃剂(过腐蚀氢)是实现物理期间转化率为汽体,最终得以为POS机人创造自己了十分的运功效率,并彻底挽救了复杂化的的部分。 充分利用特征的的记忆和金属作软体仪器人的驱动安装形式,武汉客运大学时所做的防生学软体仪器人没有很多膝关节,另一个由的的记忆和金属和承包热熔胶材料组成了,这般,能可使仪器人更高的刻服环保中的房间状况,躯干由3D直接打印做出的热熔胶材料金属外壳包括。 3D印刷硅胶材料塑料护壳便利预埋通电电缆和植入记忆力合金钢丝的空间区域,可使得局部设计的精简,塑料护壳企业自身具备一些的抗压强度性,不仅不必须要 另外的追加裝置和间接能量。
